Čínský vysoce kvalitní svařovací robot MIG pro svařování nerezové oceli







Tělo robota
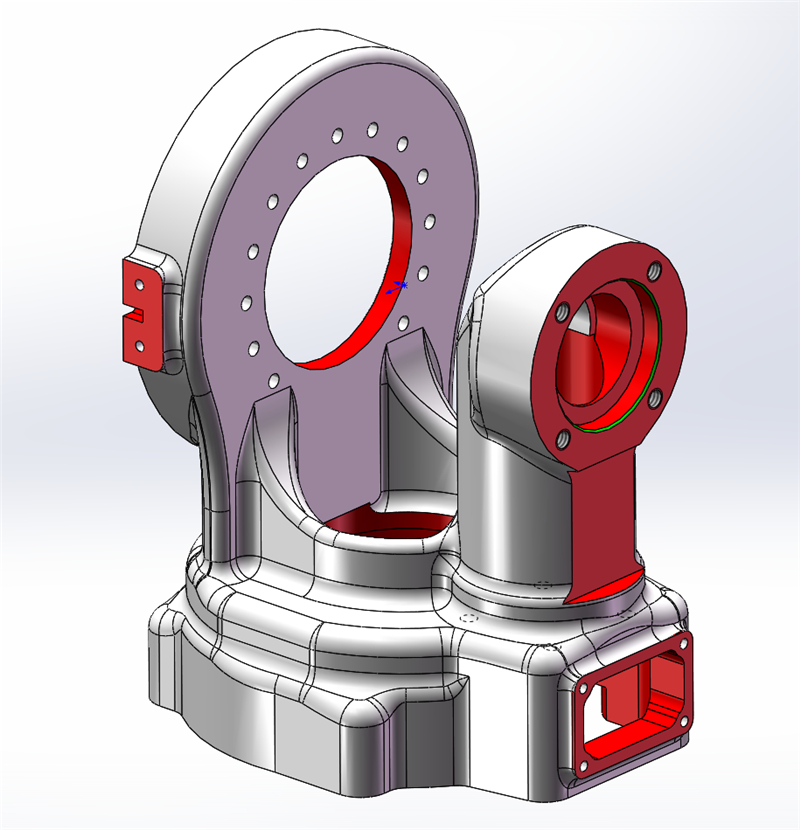
Robot JHY se mění především v procesu tlakového lití a detailním návrhu těla. Náš tým výzkumu a vývoje provedl mnoho inovací v konstrukci těla robota a vlastní více než deset nových patentů na vynálezy.
Například šestá osa vyvinula vysoce přesný převodový mechanismus a navrhla výztužné tyče, výstupní kotouč šestého kola také využívá bezpřevodovou konstrukci, což výrazně zlepšilo přesnost a stabilitu robota. I když svařovací hořák pracuje v obtížné poloze, stále dokáže zajistit stabilitu bez chvění. Tento fakt potvrzují i naši domácí zákazníci.
Tělo robota je vyrobeno technologií tlakového lití, díky čemuž jsou naši roboti s vysokou hustotou lehčí. Předloktí může být užší a delší. Poměr mezi horní částí ramene a předloktím se blíží zlatému řezu, takže se pohybuje pružněji a rychleji.
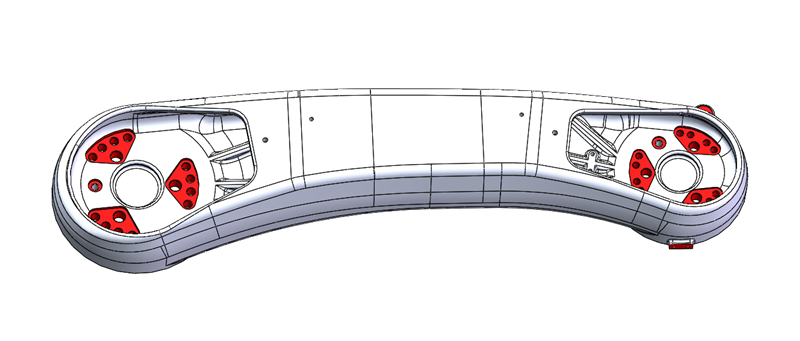
Návrh obrysu
Konstrukce rovného předloktí robota je jednodušší a elegantnější. Díky smyslu pro design více odpovídá estetice evropského trhu. Konstrukce těla robota byla patentována v řadě technických důvodů, takže nové tělo robota je dokonalejší.
Nejlepší značka drátů
Vnitřní vodiče a svorky robota jsou vyrobeny předními japonskými značkami: DYEDEN, TAIYO, stejně jako ABB a Fanuc.
Terminál: italská značka Yierma.
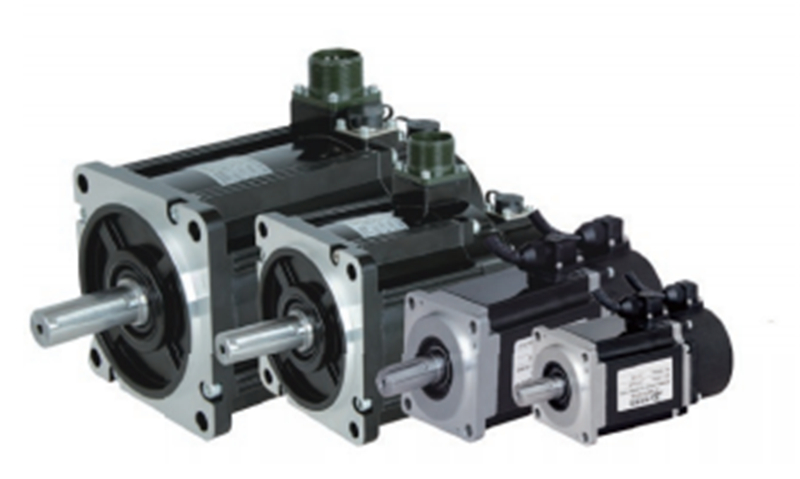
Přední značky servomotorů / ovladačů / reduktorů
Všechny používají přední čínské značky. Každá značka byla před konečným rozhodnutím dlouhodobě testována a zkoumána, abychom zajistili, že tyto značky jsou vhodné pro použití s našimi roboty a že jejich kvalita a výkon jsou stabilní a spolehlivé.
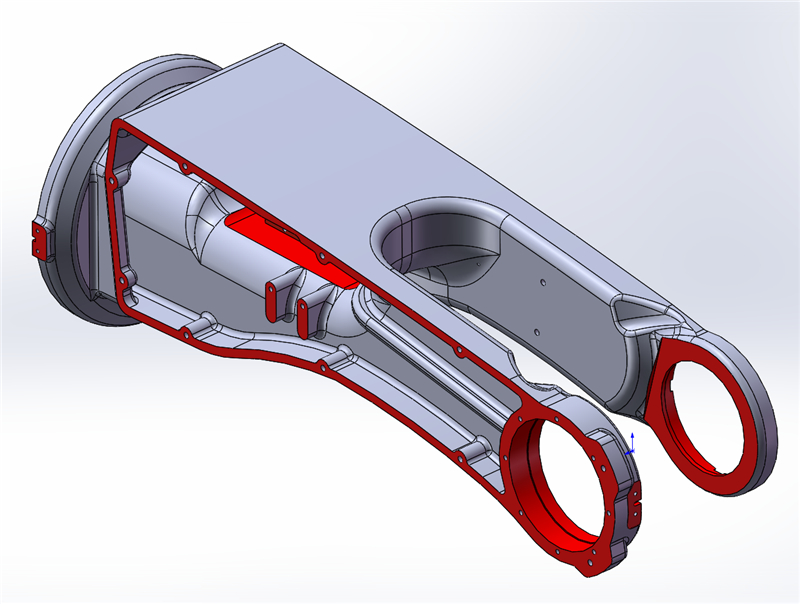
Osy J1 a J2 využívají konstrukci se třemi excentrickými hřídeli s točivým momentem až 65 Nm, což snižuje opotřebení ozubeného kola a prodlužuje životnost reduktoru. Reduktory JHY s osami J1 a J3 jsou v současnosti v Číně nejmodernější konfigurací.
Ohledně servomotoru, nyní pro roboty používáme maximálně 3kw motor.
U robotů o délce 1,8 m a 2 m je hnací síla potřebná pro 1. a 2. osu větší a požadavky na výkon motoru jsou také vyšší.
Vysoce přesné a vícespecifikační motory plně splňují požadavky aplikací na našeho robota.

3 roky/7500 hodin bez údržby
Údržba je jednoduchá, zákazníci ji snadno obsluhují sami.
Další patenty a vzory
6osý sekundární převod Změna na dva řemenové spoje, zvýšení převodového poměru a vyřešení problému příliš rychlého a nepřesného pohybu 6 os. Výstupní kotouč šesté osy je navržen bez ozubených kol s vysoce přesným převodovým mechanismem, což zlepšuje přesnost pohybu šesté osy... V současné době máme více než 30 souvisejících patentů pro svařovací robot.
Video
Parametry
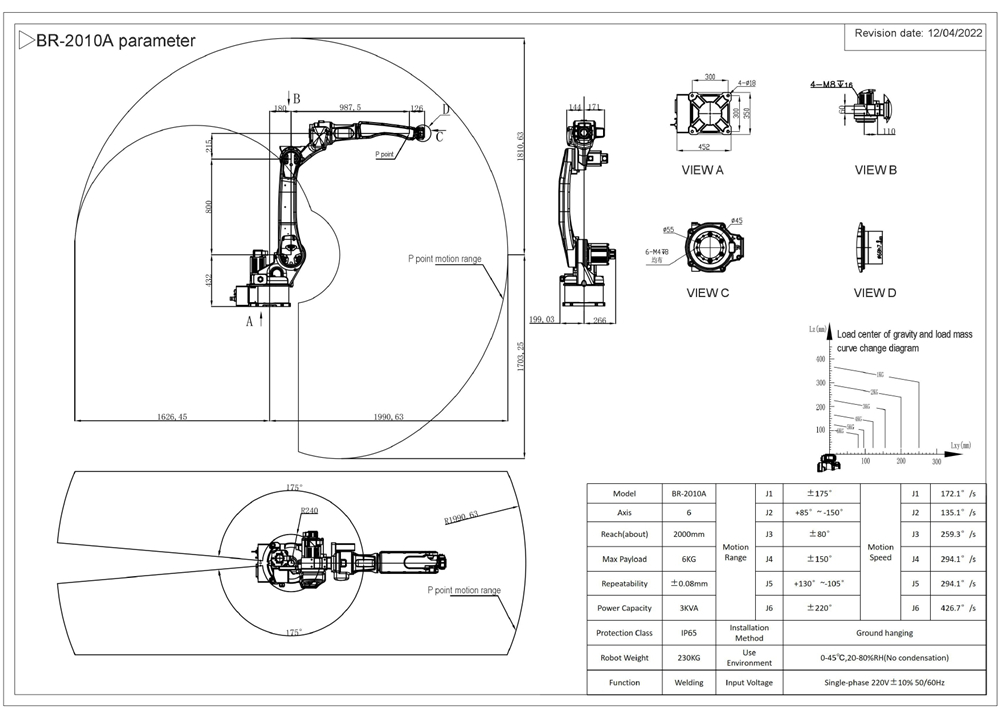
| Model | BR-2010A | Rozsah pohybu | J1 | ±175° | Rychlost pohybu | J1 | 172,1°/s |
| Osa | 6 | J2 | +85°~ -150° | J2 | 135,1°/s | ||
| Dosah (přibližně) | 2000 mm | J3 | ±80° | J3 | 259,3°/s | ||
| Maximální užitečné zatížení | 6 kg | J4 | ±150° | J4 | 294,1°/s | ||
| Opakovatelnost | ±0,08 mm | J5 | +130°~-105° | J5 | 294,1°/s | ||
| Výkon | 3 kVA | J6 | ±220° | J6 | 426,7°/s | ||
| Třída ochrany | IP65 | Způsob instalace | Zavěšení na zem | ||||
| Hmotnost robota | 230 kg | Použití prostředí | 0–45 ℃, 20–80 % relativní vlhkosti (bez kondenzace) | ||||
| Funkce | Svařování | Vstupní napětí | Jednofázové 220 V ± 10 % 50/60 Hz | ||||
Kategorie produktů
-

6osý robot pro svařování MIG s nízkým rozstřikem, dosah 1800 mm
-

6osý MIG MAG svařovací robot s dosahem 1500 mm s ...
-

Vysoce kvalitní svařovací robot používaný ke svařování nábytku
-

JHY 6osé robotické rameno průmyslové automatické obloukové frézování ...
-

Svařovací robot s dosahem 2000 mm pro svařování uhlíkových s...
-

MIG svařovací robot s rozpětím 2000 mm pro nerezové...